مد (Mode) در سیستم ها اغلب نیروی محرک کنترل کننده می باشد که در درایور برای کنترل الکتروموتورها بر پایهی V/F می باشد.
انواع مدل های کنترل کننده درایو کنترل دور موتور
مد کنترل V/F اسکالر (Voltage per frequency)
در این مد ولتاژ و فرکانس با یک شیب یکنواختی به حداکثر می رسد.
این مدل برای مصارفی مثل پمپ، فن و نوار نقاله مورد استفاده قرار میگیرد که احتیاج به گشتاور بالای ندارند.
مدل کنترل حلقه باز بدون سنسور و فیدبک SVC
(sensorless vector control – open loop)
این مد به طور مستقیم سرعت و گشتاور موتور را کنترل می کند و سرعت و گشتاور بالای نسبت به V/F دارد و در جاهای استفاده میشود که گشتاور بالای نیاز داشته باشند.
مثل ماشین الات سنگین ،اسیابهای سنگ معادن وازاین جمله موارد.
مد کنترل حلقه بسته با سنسور و فیدبک VC
(vector control and encoder)
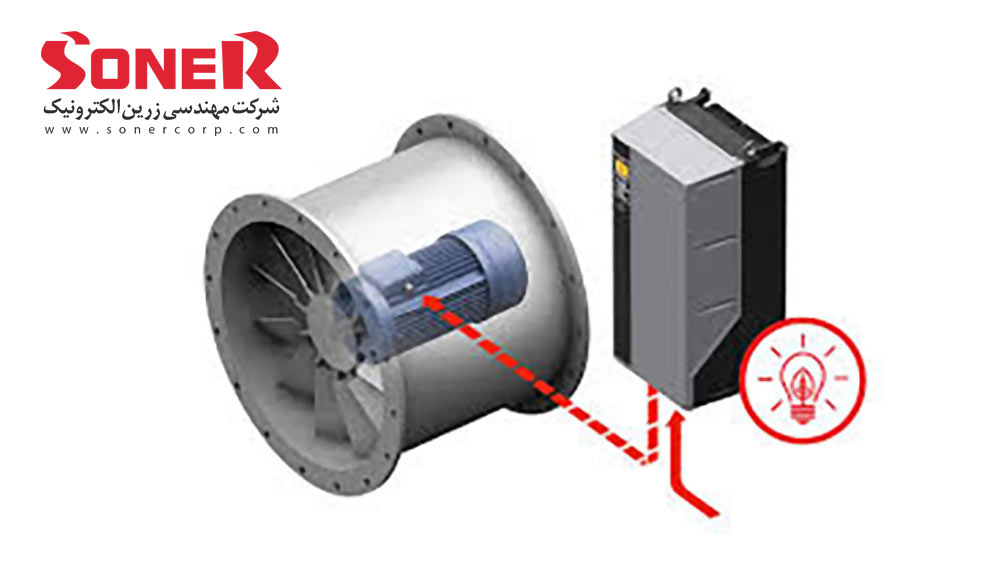
در این مد برای کنترل سرعت و گشتاور به منبع سیگنال وابسته است و این مد دارای دقت بالاتری بوده و ضریب خطای پایینی نسبت به مدهای دیگر دارد.در این مد فرایند کنترل موتور با استفاده از فیدبک انکودر و سنسورهای دیگر صورت می گیرد.
کنترل گشتاور (Torque Control)
سرعت چرخش موتورهای القای متناسب با فرکانس است . میتوان تنها با فرکانس ضریب توان بازده موتور را تغییر داد.با تغییر فرکانس مقاومت ،امپدانس داخلی موتور تغییر می کند و باید ولتاژ متناسب با فرکانس تغییر کند.با کنترل گشتاور میتوان مقدار فرکانس را کنترل کرد تا سیستم با سرعت خطی یکسان و ثابت حرکت نماید.
برای جاهایی مورد استفاده قرار می گیرد که احتیاج به کنترل گشتاور مانند جمع کننده ها و باز کنندها (winder . unwinder) باشد.
کنترل مستقیم گشتاور DTC (Direct torque control)
این مدل برای کنترل گشتاور و سرعت موتورهای سه فاز ACمورد استفاده قرار می گیرد. محاسبه تخمینی گشتاور و شارمغناطیسی موتور بر اساس ولتاژ و جریان اندازه گیری شده موتور است.
در آسانسور ، نوار نقاله و جرثقیل از این مد کنترل بهره می گیرند.
DTC بر خلاف مدولاسیون pwm از یک فرکانس سوچینگ ثابت استفاده نمی کند.